





RWD Life Science
Zautomatyzowana stereotaksja z nanoiniekcją
Kod 71001-S/71001-D
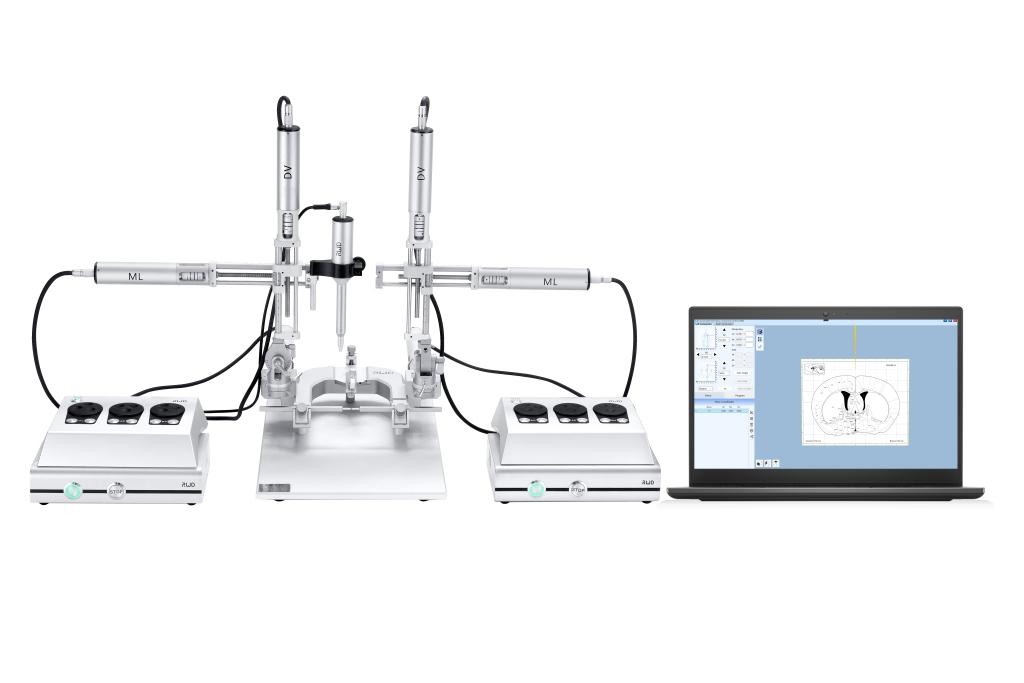
Zautomatyzowany instrument stereotaktyczny doskonale pozycjonuje głowę myszy lub szczura za pomocą automatycznego sterowania komputerowego. Integracja z systemem „Atlas” oraz intuicyjna kontrola ruchu zapewniają wysoką dokładność, precyzję w manipulacjach elektrofizjologicznych oraz w podaniach stereotaktycznych. System ten prawidłowo zabezpiecza głowę zwierzęcia w pozycji idealnie poziomej podczas wykonywanego zabiegu stereotaktycznego.
Dowiedz się więcej
Zobacz inne produkty w zastosowaniach
Cechy
- Zintegrowany atlas mózgu szczura i myszy oraz wyświetlacz 3D, który pomaga w szybkiej i dokładnej lokalizacji docelowego obszaru mózgu.
- Sterowanie komputerowe
- Integracja atlasu mózgu
- Intuicyjna nawigacja
- Zautomatyzowany program zadań (np. program „okna czaszki”, usuwanie tkanek czy program wielopunktowy) może zaspokoić różnorodne potrzeby eksperymentalne.
- Planowanie eksperymentów
- Niwelowanie błędów pomiarowych ludzkiego oka
- Możliwość zdefiniowania własnych parametrów
- Wysoka przepustowość
- Ustawienie punktu Bregmy jednym kliknięciem z rozdzielczością 1 mikrona.
- Ustawienie Bregmy
- Ultra precyzja
- Dostępne trzy tryby sterowania (oprogramowanie komputerowe, mikromanipulator oraz sterowanie za pomocą klawiatury).
- Wygoda
- Oszczędność czasu
Specyfikacja
- Ramię robocze porusza się w pozycjach: w górę, w dół oraz w lewo i w prawo, a także do przodu i do tyłu w zakresie 80 mm za pomocą precyzyjnej śruby (dokładność ruchu: 1 μm);
- Jednoprzyciskowa funkcja kalibracji. Podczas długoterminowego użytkowania parametrów wyświetlanych na komputerze, użytkownik może skalibrować odchylenia odczytu lokalizatora za pomocą jednego klawisza;
- Funkcja sterowania ruchem w 4 trybach: a. Sterowanie za pomocą strzałek interfejsu w oprogramowaniu PC; b. Koniec kontrolera PC automatycznie przesuwa się do współrzędnej docelowej po wprowadzeniu precyzyjnej pozycji współrzędnych; c. Platforma mikrooperacyjna precyzyjnie kontroluje ruch pozycjonera. Każdy obrót pokrętła o 18° powoduje przemieszczenie o 1 μm; d. klawisze klawiatury bezpośrednio sterują ruchem lokalizatora.
- Funkcja regulacji prędkości ruchu lokalizatora, a. Prędkość ruchu można regulować, wprowadzając prędkość ruchu w odpowiednich położeniach trzech osi w interfejsie oprogramowania PC. Wśród nich: oś AP i oś ML. Możliwość wyboru spośród 5 prędkości ruchu: 2,00 mm / s, 00 mm / s, 0,50 mm / s, 0,20 mm / s oraz 0,10 mm / s. Do wyboru 8 rodzajów prędkości ruchu osi DV: 2,00 mm / s, 1,00 mm / s, 0,50 mm / s, 0,20 mm / s, 0,10 mm / s, 0,05 mm / s, 0,01 mm / s, 0,005 mm / s i 0,001 mm / s; b. Pod koniec operacji, prędkość ruchu trzech osi można również równomiernie regulować za pomocą przycisków;
- Ustawienie punktu Bregmy / Lambdy za pomocą jednego kliknięcia. Kiedy użytkownik używając lokalizatora, może zdefiniować dany punkt, aby w prosty sposób dotrzeć do punktu Bregmy / Lambda. Wystarczy jedno kliknięcie, aby ustawić konkretną lokalizację punktu Bregmy / Lambda.
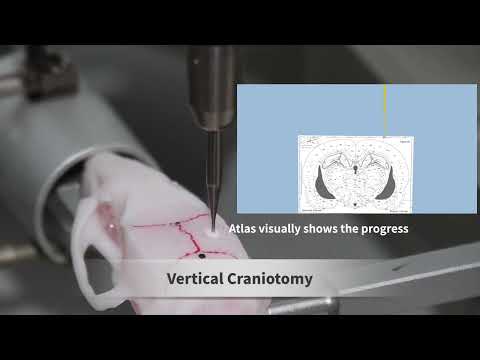
- Współrzędne lokalizatora są zintegrowane z mapą mózgu. Obecna wersja atlasu mózgu to druga wersja atlasu mózgu myszy i szósta wersja atlasu mózgu szczura. Użytkownik może wybrać odpowiednią wersję mapy mózgu, która zostanie wyświetlona, a wraz z nią wszelkie informacje dotyczące lokalizacji mózgu;
- Wyświetlanie pozycji sondy oraz mapy mózgu. Gdy użytkownik znajdzie i ustawi punkt Bregmy / Lambda, interfejs komputera może wyświetlić mapę mózgu oraz lokalizację sondy, a ponadto może wyświetlić proces ruchu w czasie rzeczywistym;
- Automatyczny program kraniotomii. Do wyboru 2 rodzaje kształtu: kwadratowy lub okrągły. Parametry długości i szerokości w zakresie: 0 ~ 20 mm, natomiast głębokość w zakresie: 0 ~ 20 mm. Do wyboru 5 rodzajów prędkości ruchu dla osi AP i ML oraz 8 rodzajów prędkości ruchu dla osi DV;
- Wielopunktowe ustawienie programu. Użytkownik może ręcznie wprowadzić lub wybrać do 10 współrzędnych na mapie mózgu. Możliwość wyboru pracy automatycznej lub rozpoczęcia operacji po wyzwoleniu sygnału. Użytkownik może również ustalić czy lokalizator ma wyprowadzać sygnał TTL po osiągnięciu punktu docelowego. Użytkownik może ponadto ustawić czas przebywania w każdej lokalizacji (zakres: 00:00:00 - 23:59:59);
- Procedura izolacji tkanki. Dwa kształty do wyboru: kwadratowy lub okrągły. Parametry długości i szerokości w zakresie: 0 ~ 20 mm, natomiast głębokość w zakresie: 0 ~ 20 mm. Możliwość podłączenia 2 igieł: 27G i 30G. Sześciostopniowy współczynnik gęstości oraz 5 rodzajów prędkości ruchu dla osi AP i osi ML, a także 8 rodzajów prędkości ruchu dla osi DV;
- Funkcja przechowywania współrzędnych pozycji. Użytkownik może ręcznie wprowadzić lub wybrać różne współrzędne na mapie mózgu, a następnie nazwać je i przechowywać do 10 wybranych punktów;
- Funkcja cofania osi Z. Podczas definiowania punktu Bregmy / Lambda, gdy lokalizator porusza się w kierunkach X i Y, należy najpierw wycofać sondę znad czaszki zwierzęcia (niezależnie od tego, gdzie w osi Z znajduje się sonda). Takie położenie (5 mm na powierzchni) zapewnia, że poziomy ruch lokalizatora nie dotknie czaszki zwierzęcia;
- Funkcja przeciwluzowa, która może pomóc wyeliminować błędy spowodowane przerwą między zębatkami silnika (w momencie, gdy silnik porusza się do tyłu). Użytkownik może włączyć lub wyłączyć tę funkcję;
- Funkcja automatycznego dziennika zapisywania błędów, wygodna przy konserwacji urządzenia.
- Oprogramowanie wymaga dostosowania do chińskich i angielskich systemów operacyjnych win7, win10.
- Funkcja alarmu. Wykrywanie błędów w czasie rzeczywistym oraz zatrzymanie ruchu wszystkich części w przypadku pojawienia się problemów.
- Zdolność do odbierania lub wysyłania sygnałów TTL, np. w celu automatycznego poruszania się instrumentu stereotaktycznego zgodnie z ustaloną wcześniej procedurą lub wysyłania sygnałów TTL po osiągnięciu określonej pozycji;
- Sterowanie mikrooperacyjne, które można realizować poprzez ruch ciągły za pomocą przycisku lub poprzez w pełni automatyczny lokalizator stereotaktyczny.
- Panel kontrolny posiada dwa rodzaje lampek zasilających, stan normalny to światło zielone, a stan alarmowy to światło czerwone;
- Panel kontrolny posiada interfejs zasilania 12 V, port USB do komunikacji z komputerem, 3 interfejsy silnika (w celu rozróżnienia posiadają zróżnicowane logo sitodruku) oraz interfejs BNC, który obsługuje sygnał TTL.









